|
当時、21世紀はしんどい仕事はみなロボットがやって人間はクリエイティブな作業だけをする 時代になると信じていたのですが、逆にロボットに仕事を取られようとは・・・・ 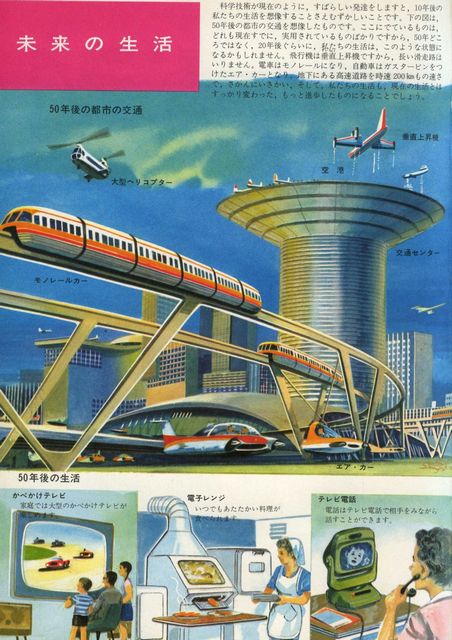 壁掛けテレビはいい線いってます。電子レンジに本格的な局所排気装置が付いているのがすごいです。 テレビ電話は相当昔の技術でも作れたはずですが、普及はしなかったですね。 実際、顔が見えると困る場面も多いですからね。女のひとはみんな電話する前に化粧をしなければなりませんし。 この手の予測で必ずあるのがエアカーなのですが、これは浮上させるためのエネルギーを考えると普及しそうにないですね。技術的には楽に作れそうですが。 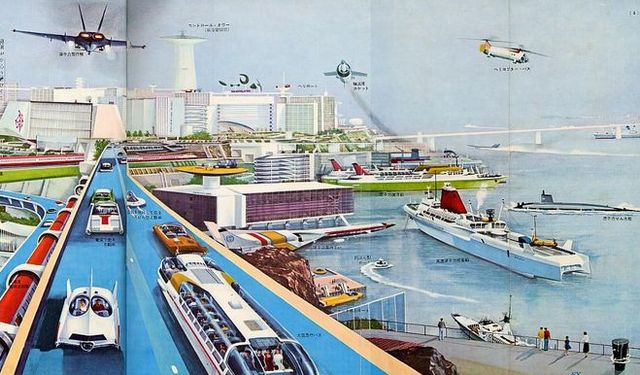 こちらは原子力潜水艦・原子力客船・原子力飛行機など原子力のオンパレードです。 潜水艦や客船に原子炉を搭載するのならメリットが大きそうですが、飛行機は微妙かもしれません。 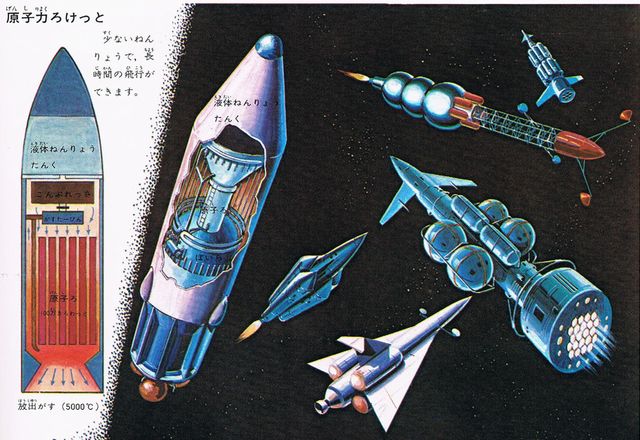 さらに原子力ロケットです。原子炉を宇宙空間に持っていくのに相当のエネルギーが要りそうですが・・・。 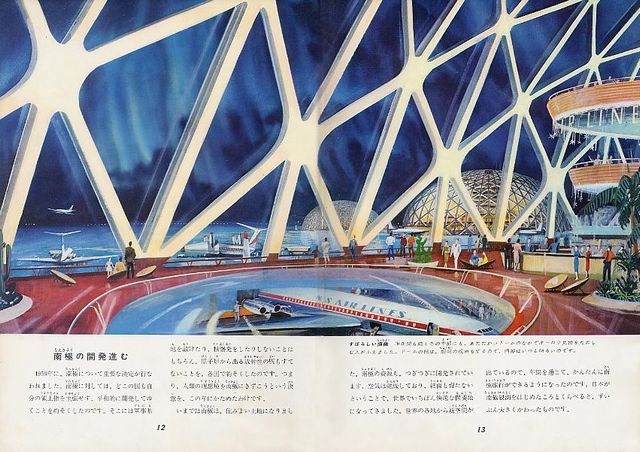 こっちでは南極が開発されてこんなことになってます。 北極なら航空機の航路を通すメリットがあるかもしれないので、これと近いことが 有り得たかもしれませんが、南極は遠すぎますね。 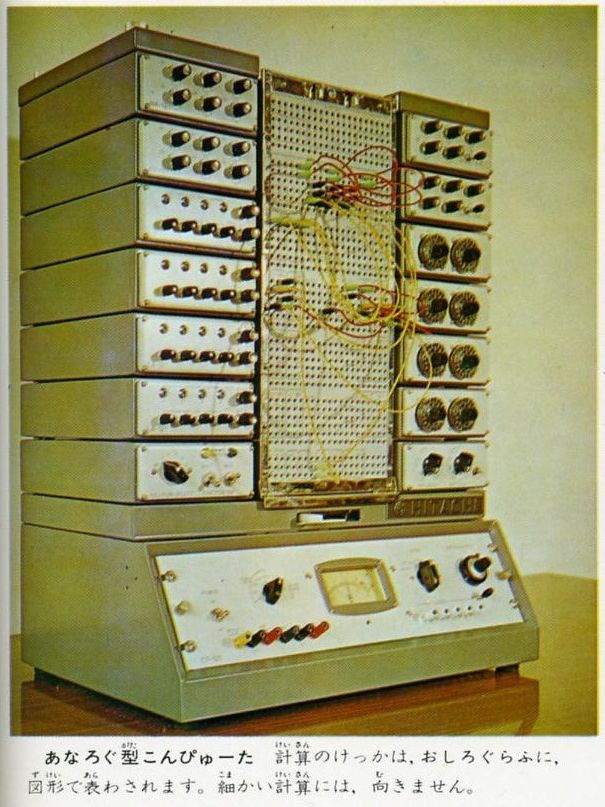 アナログ型コンピュータです。コンピュータというか、一種の計算機ですね。 「細かい計算には向きません」という表記がおかしいです。 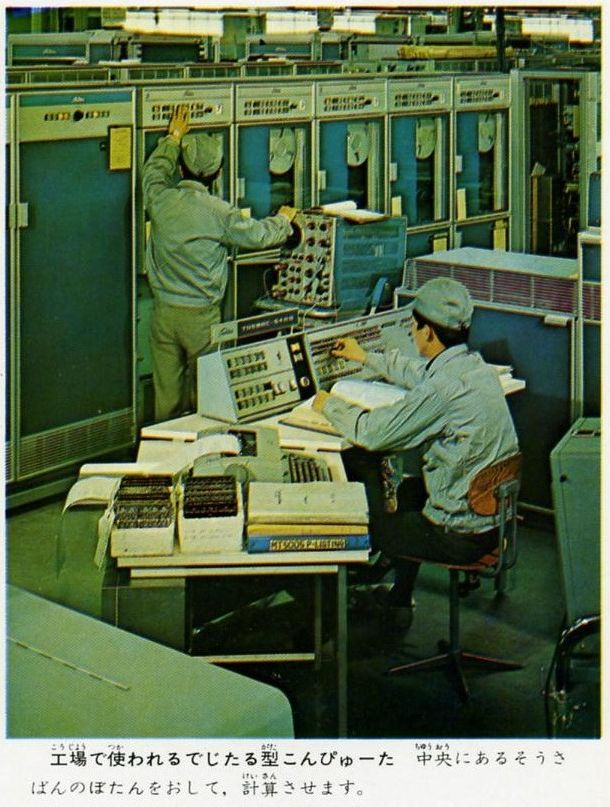 ちょっと進んでこちらは本物のコンピュータです。 この時代、普通はディスプレイなどというものはなく、計算結果はラインプリンターに打ち出されました。 メモリはトランジスタなどの半導体ではなく、磁気コアと呼ばれる一種のコイルのようなものを使っていました。 メモリボード1枚で256バイトとか今とは桁がいくつ違うのでしょうか・・・ SUNのワークステーションが暴走するとHDD上にcoreと呼ばれるメモリ状態を保存した ファィルを自動作成するのですが、それはこのコアメモリの名残りらしいです。 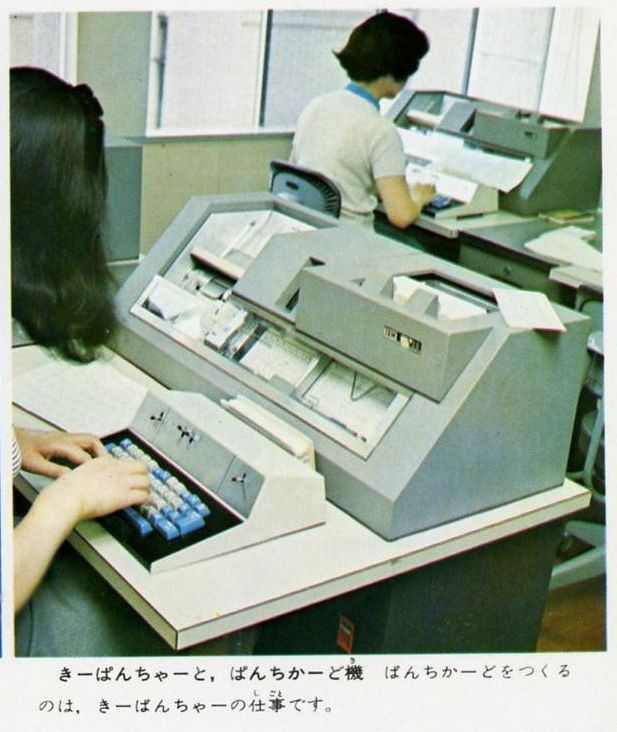 コンピュータへの入力はパンチカードで行われました。 キーパンチャーのお姉さんがプログラムを入力していきます。 FORTRANプログラムの1行がカード1枚に相当するので相当な数のカードを作る必要があります。 作ったカードを読ませる「カード読ませ」というアルバイトも存在していたらしいです。 力学計算プログラムなどで入力データの行を「カード」と呼んだりするのはこの名残りらしいです。 ・・・って今頃テキストでデータ入力はしないですわな。 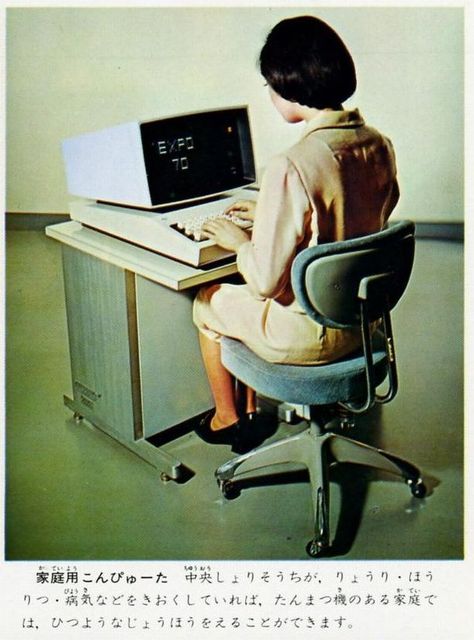 1970年に予測された未来のパソコンの使われ方。 だいたい合ってますが、情報源は中央処理装置ではなくインターネット網でした。 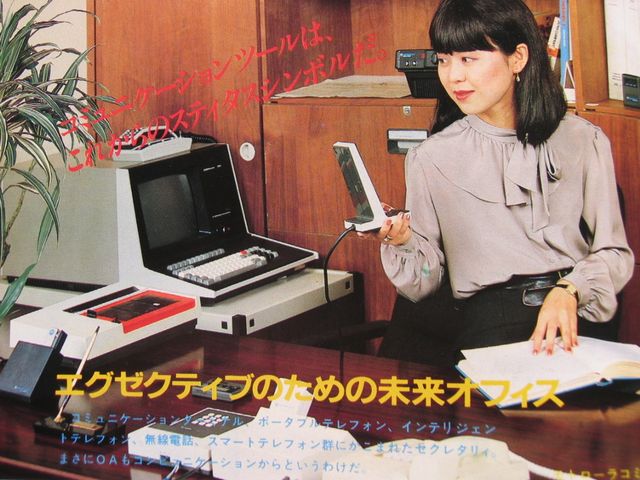 初期のログインに載っていた「未来オフィス」の写真です。 未来といいつつも結構レトロ調でなかなかいい感じです。 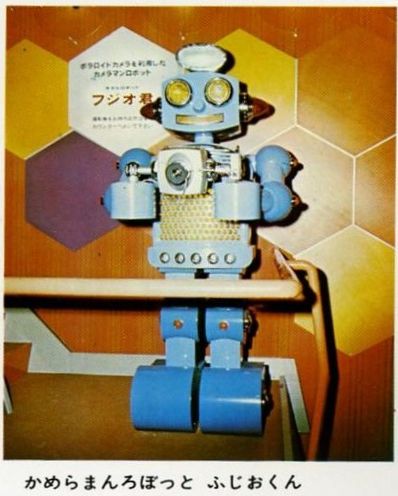 カメラマンロボット「フジオ君」・・・ってシャッター押してるだけですねこれ。 造形にはかなり力が入っていますが、センサー的なものも何も付いていませんね。光センサーすら付いてません。 おそらく、ラジコンかリモコンでシャッターを押させたのでしょう。 電子回路が必要になりそうなのはランプ類の制御ぐらいでしょうか。 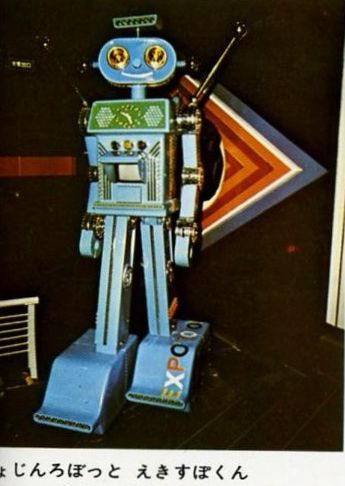 巨人ロボット「エキスポ君」・・・歩くことができるようですが、足に関節が全くありません。 なぜかアナログ時計を内蔵してます。というか、アナログ時計しかなかったんですね。 スピーカーやブラウン管らしきものも見られるので、フジオ君よりはずっと高性能なようです。  大変な山登りもロボットに荷物を持たせれば楽々です・・・。 というか、動力源が足りませんね。 どうやら電池は何十年経ってもそれほど進歩してないように思えます。 ロボットのデザインが上の2体と酷似しているのですが、同じ人がデザインしたのでしょうか? 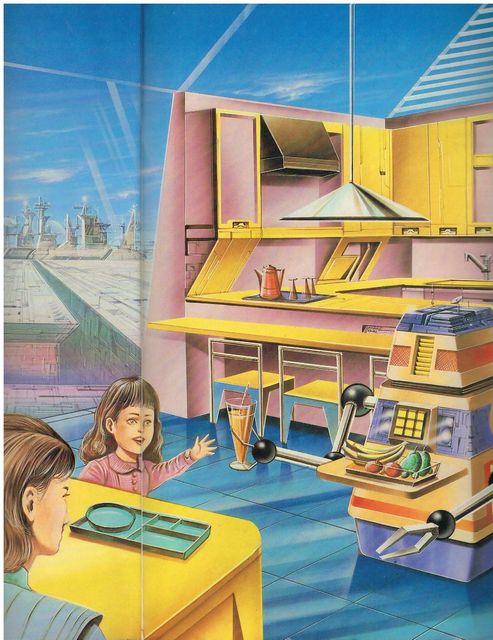 お手伝いロボットです。 この手ではジュースとか果物を運ぶことしかできなさそうです・・・ ロボットはヘボいのですが、この家はすごいところに建ってそうです。  実際に発売された家庭用ロボットです。 左のやつは1983年の初めに出たTOPOというロボットで、APPLE][で プログラミングして操作します。 右のやつ1982年末に発表されたHERO1というロボットで、マニュアルは 1200ページもあるそうです(とても使えそうにないです)。 家庭用ロボットはこんな昔に登場したのですが、残念ながら今だにまともに 使い物になるものが無いですね。 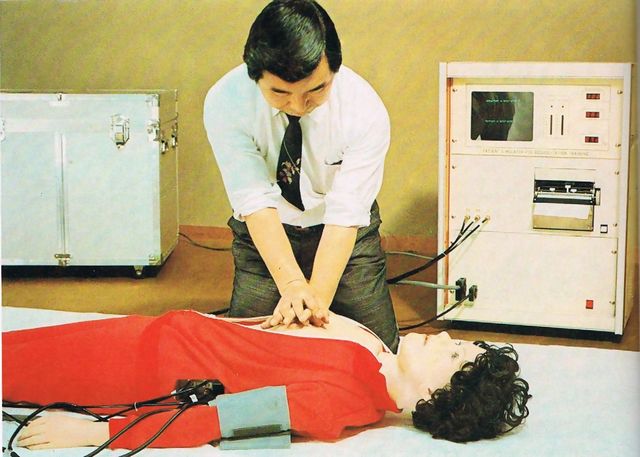 医療用の患者ロボットです。 実際の目的はおっぱいを押して楽しむためにあるとしか思えません。 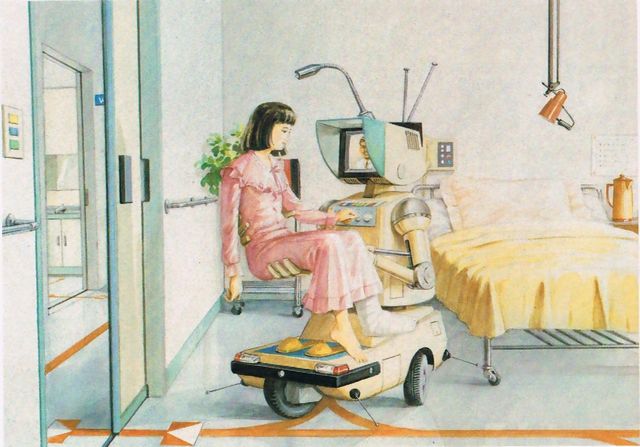 医療用の介護ロボットです。 こんな高価そうなロボットを投入するぐらいなら人を雇った方がはるかに 安くつきそうなのですが・・・ 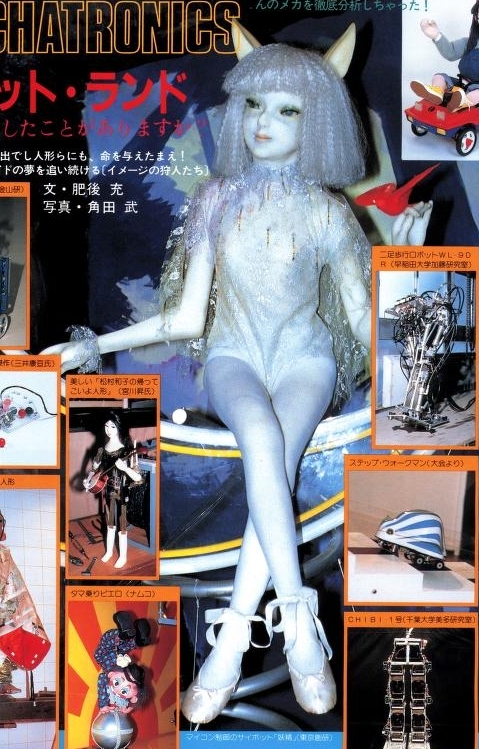 1982年頃に水野俊一さんという方が作られたサイボット「妖精」さんです。 (写真はテクノポリス82年8月号より) サイボットは精巧に造られた「からくり人形」のようなもので、 多数のエアアクチュエーターを駆使して恐ろしくリアルに動きます。 他にもマリリンモンローとか色々な子がいたようです。 この技術は1984年の東宝の映画「ゴジラ」にも使われています。 
 静止画では判りませんがスムーズに動きます。右側はアクチューエーターの制御装置のようですね。  2009年に産総研から発表されたアンドロイド、HRP-4C、愛称は未夢(ミーム)さんです。 身長158cm、体重43kg。身長は日本人女性の平均に、顔は産総研の女性スタッフ5名の顔を合わせて作られた という愛らしいロボットです。 けっこうな人気でこの子のプラモデルも作られたようです。 タイミング悪く東日本大震災で原発が壊れてロボットで復旧すればいいという話が出てきたときに 「なんでこんな役に立たないものを作ってるんだ」ということでかなり批判があったそうで、 それ以降はしばらく産総研はロボット的なロボットしか作れなくなってしまったようです。 個人的にはすばらしい出来栄えだと思うのですが。  歌って踊る未夢さん。なかなかの芸達者です。  2011年に昭和大学歯学部が導入した歯科治療シミュレーション用のロボット昭和花子2さんです。 ロボットの開発はテムザック、造形はあのオリエント工業が携わったということですごいリアルさです。 遠目には人間にしか見えません。 なお、患者ロボットはこれで4代目だそうで、初代はマリリン、2代目はさゆり、 3代目が初代の昭和花子さんだということらしいです。  2代目患者ロボット「さゆり」さん。性能は花子2さんより上とのこと  そして2020年、テムザックから子供型患者ロボットPedia Roidが発表されます。 この子はかなりすごいです。診察を嫌がって声を出しながら暴れるのですが、 目の部分が液晶表示になっていて表情が恐ろしいくらいにリアルです。  目がやばいって・・・ |